Servomotor y pulsador.
Hola, hoy vamos a realizar varios circuitos relacionados con un servomotor y un pulsador. El servomotor es un motor como dice su nombre que puedes programar para que gire hasta 180º y el pulsador es una clase de interruptor que hace que cuando lo pulses se desencadene una determinada acción. Aquí voy a enseñar y explicar un poco lo que vamos a hacer:
Circuito 1:
En este circuito vamos a hacer que un servomotor se active 90º al pulsar una vez el pulsador y después de 4 segundos, vuelva a su sitio.
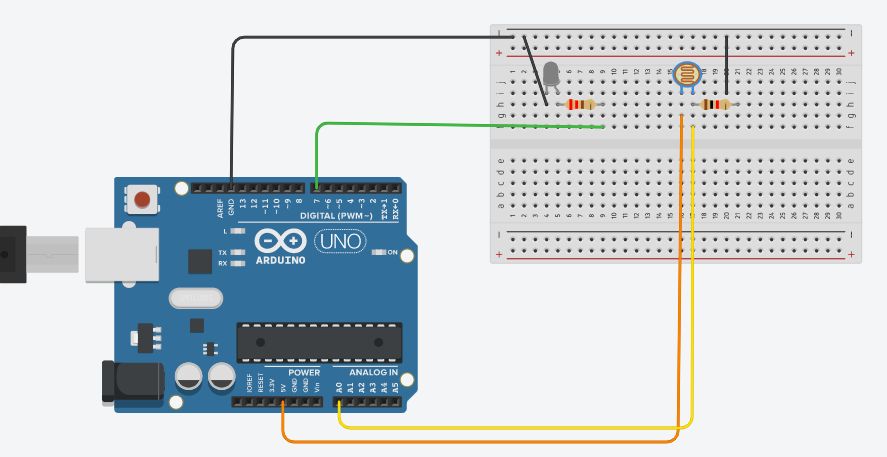
Conexiones:

Código:

Aquí, en el código primero creamos una variable y decimos que es el valor que nos diga el pulsador, luego decimos que si el pulsador es igual a 1, es decir que si lo pulsamos, se mueve el servomotor 90 grados y espera 4 segundos para volver a su posición normal.
Simulación:
Circuito 2:
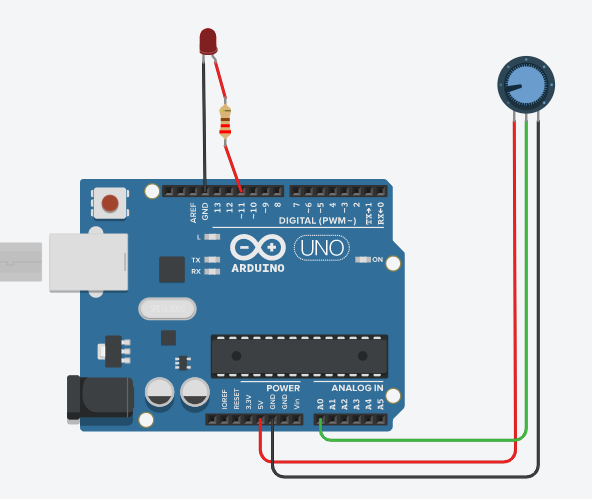
En este circuito, un podemos controlar con un potenciómetro un servomotor.
Conexiones:

Código:

Simulación: